

26 May UAV Mapping Team Takes Flight
Seems UAV drones are all the buzz these days, and according to Chris Cryderman, President of Underhill Geomatics Ltd., they fill an important niche. Says Cryderman, “Before UAVs, mapping was done either via conventional aircraft with expensive aerial cameras and LiDAR, or by surveying on the ground. Each approach had its advantages. Aerial mapping covered very large areas with high accuracy. Surveying on the ground was better suited to smaller areas, but the accuracy was much higher. Small UAVs fall in between these two. Now, areas of several square kilometres can be mapped economically, and accurately, with an aerial drone.”
“UAVs are a game changer, and there are a couple of approaches you can take to get into the game”, says Bill Mah, Underhill’s chief drone pilot and engineer. According to Mah, “A number of systems are now available off-the-shelf. These turn-key solutions get you up and running with little intellectual investment, but at a much higher capital cost. There is also a large educational research and DIY hobbyist community that has pursued open source drone hardware and software development. This second approach is what we chose to build on. We found it was more economical, and provided greater flexibility. By developing the system ourselves, we really understand the issues, and how it all works.”
All of these small UAVs, and their payloads, are a compromise. Generally, the smaller the aircraft, the faster it must fly, and the smaller the payload must be. Underhill’s approach first defined an optimal payload (camera) that could do the work, and then an airframe was chosen that could easily carry it. They needed a two metre wingspan aircraft to fly the camera. This size of aircraft also had the advantage that it could fly and land quite slowly. The aircraft provided better flexibility in photo collection than its smaller “off-the-shelf” counterparts and provided greater control, and safety, in mission execution.
-

- Field assembly of UAV

-

- UAV electronics

-

- Payload

-

- Ground Control (Radio and GCS)
-

- Mission planning
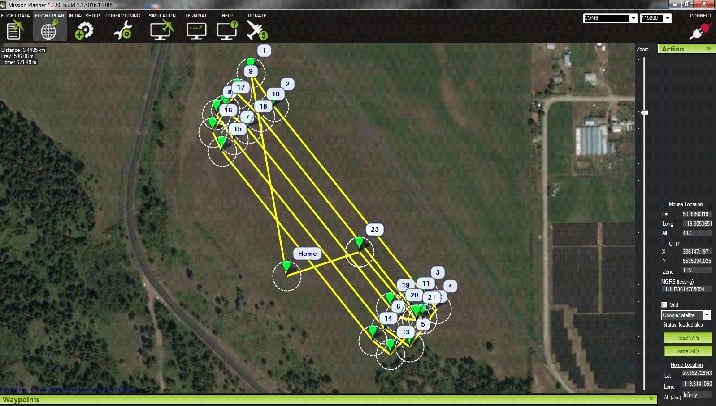
-

- UAV fly-by

Insurance providers will tell you that you are likely to suffer a total loss of your UAV in as few as six flights. This fact really impacts how much of an investment you feel comfortable losing, and how you amortize that cost. “The DIY approach means we can keep the cost down to a minimum, while ensuring that we have a payload that can produce the goods.” says Cryderman.
These UAV drones are actually flying robots. They have a computer autopilot that can be programmed to tell the drone where to fly. With the autopilot, the UAV can then fly the programmed mission autonomously. This does not negate the need for a pilot. On the contrary, Transport Canada regulations treat drones much like conventional aircraft – but with greater restrictions. Public safety is the prime concern. In the event of a problem, a pilot must be able to take over flying from the computer – in an instant. This means the drone must not only be within line-of-sight of the pilot at all times, but he must be able to assess its flight status, and chose an appropriate course of action, in any situation. The Underhill system was designed with this in mind. Redundant backup control systems are built in to help minimize the inherent risks.
Aeroquest Mapcon Inc. has been pursuing a parallel UAV program to Underhill but using an Octo-copter (an eight rotor aircraft) instead of a fixed-wing aircraft. With its vertical takeoff and landing (VTOL) capability, this UAV excels in smaller, more confined airspace, while still being usable for larger areas. The Mapcon and Underhill systems are complimentary, both optimized for their chosen missions. “With the different UAVs, we can select which is better suited to a particular situation,” states Andrew Dawson, General Manager of Aeroquest Mapcon. Aeroquest Mapcon also brings their considerable aerial survey and photogrammetric experience to the fray. “We are excited about the establishment of the UAV division within Aeroquest Mapcon. It opens up new markets for our aerial mapping service offerings.” says Dawson.
-

- Octo-copter with Canon DSLR payload

-

- Colorized DSM

-

- Octo-copter taking vertical photography

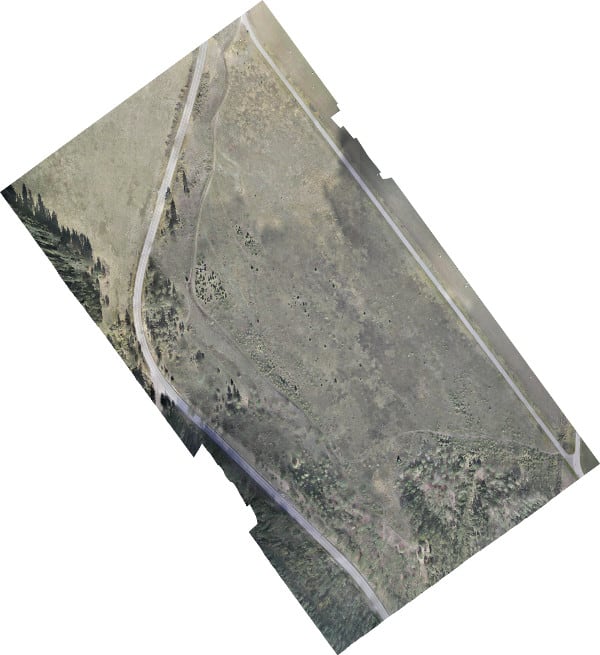
-

- Orthophoto

Any mapping product produced from conventional digital aerial photography can be produced from drone photography. Orthophotos, digital elevation models, LiDAR-like point clouds, line mapping, multi-spectral imaging, and volume computations are all possible.
-

- Orthophoto
-

- Detail of orthophoto with contours

-

- Detail of othophoto with contours

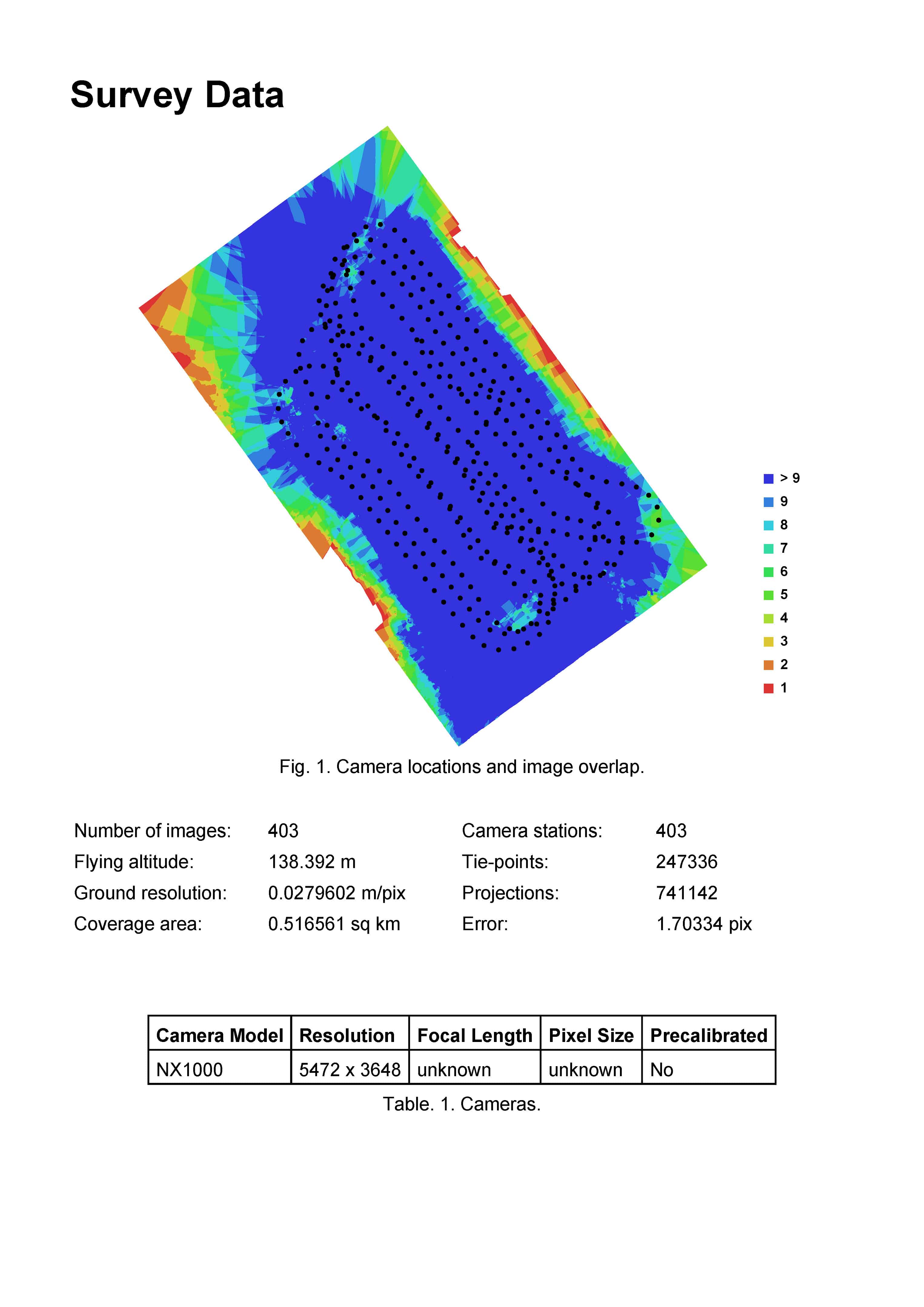
-

- Photo Coverage
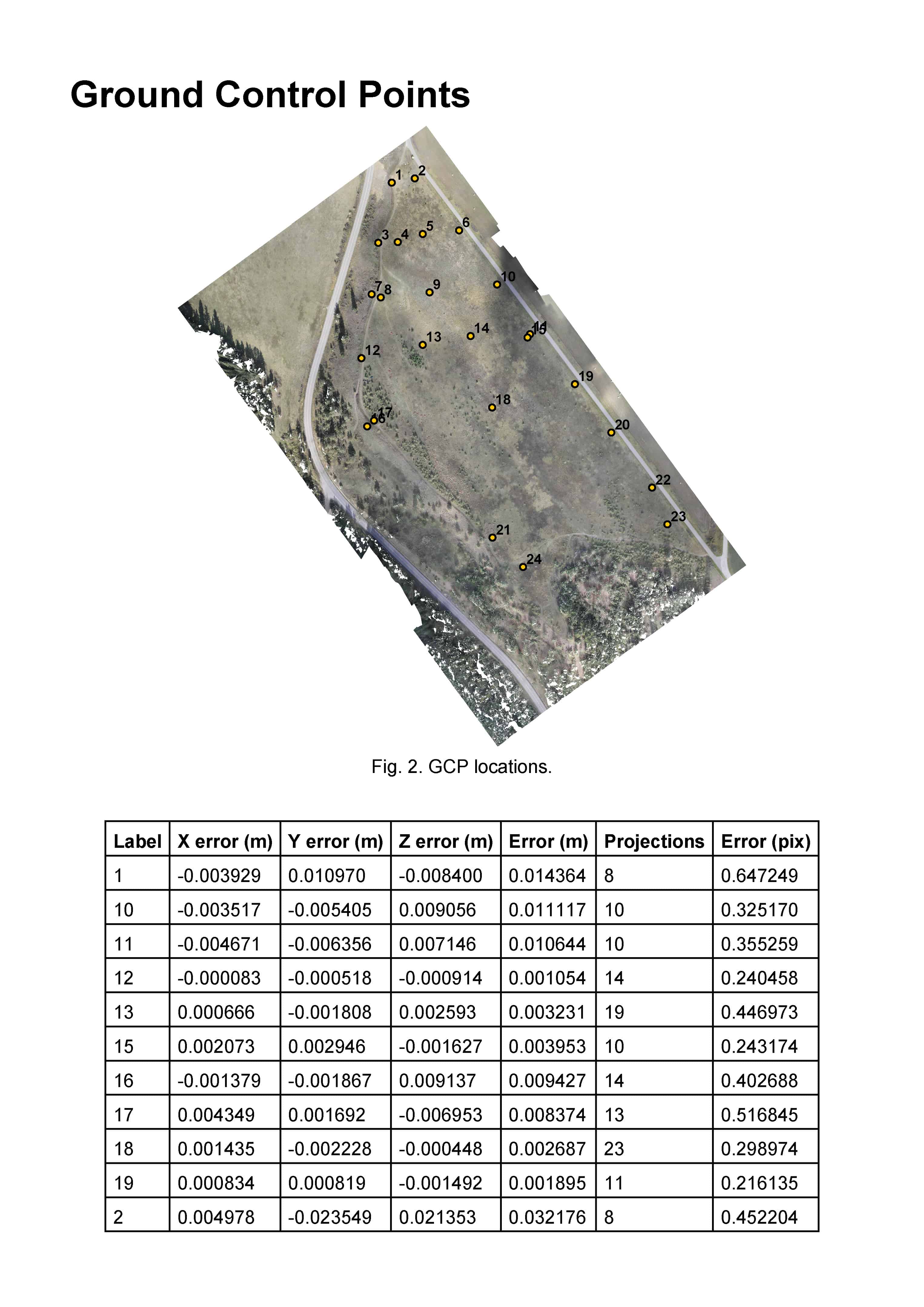
-

- Ground Control
-

- Shaded DSM (ground)

The above orthophoto can be viewed overlaid in Google Earth. It is about 450 Mb which, while much smaller than the original (2Gb), is still pretty big. If you load it, you will notice a difference between our photography and Google’s imagery at the northwest corner. The Google imagery is out about 22 metres east-west. This can be confirmed by loading the Canada Lands Survey System KML file of the property boundaries in the area. Our orthophoto fits this data quite well.
The following Adobe Acrobat 3D pdf contains an interactive model of the above mapping project. If you are not familiar with viewing 3D pdfs, you must first place your cursor over the image and select “click to activate…”. Then, in the yellow pop-up menu bar, select “Options”, and “Trust this host one time only”. Finally, place your cursor over the image and select “click to activate…” again.
The model should now load. Once loaded you can:
1. Hold down the left button of your mouse to rotate the model,
2. Zoom in and out with the scroll wheel
3. Move the model by holding down both “Ctrl” and the left mouse button.
You can make the whole image area larger by using “Ctrl +” in Windows.
You can download the file here(40Mb).
According to Mah, “The future is bright for drones. There is so much development activity going on…you really have to keep on top of it. Who knows where this will lead in the next few years? It can only get better, and we’ll be ready for whatever arises.”